

در این مطلب مبحث تعیین موقعیت و سامانه ماهواره ای GNSS جی ان ان اس را که ممکن است به GPS جی پی اس بشناسید مفصل شرح می دهیم.
از مفهوم تعیین موقعیت شروع می کنیم و سامانه جهانی GNSS را توضیح خواهیم داد. بعد از آن فرکانس های مختلف و روشهای برداشت موقعیت را نام برده و هر کدام را مختصرا توضیح می دهیم . بعد از آن در مورد دستگاه های مولتی فرکانس صحبت می کنیم و در آخر سوالهایی که از مهندسین دریافت کرده ایم بهمراه پاسخ آنها قرار داده ایم. تا انتهای این مطلب با ما همراه باشید.
در ویدئوی زیر هم نقشه برداری با گیرنده های مولتی فرکانس را توضیح داده ایم اگر ویدئو را به متن ترجیح می دهید این ویدئو را مشاهده کنید:
مفهوم تعیین موقعیت
شناسایی و تعیین فاصله و زاویه یک جسم نسبت به یک جسم دیگر و یا نسبت به مبدا مختصاتی، تعیین موقعیت گفته میشود.
اگر ساده ترین حالت را مانند تصویربالا در نظربگیریم؛ تعیین مختصات یک نقطه روی صفحه مختصاتی نسبت به مبدا مختصاتی، که صفر صفر است، تعیین موقعیت گفته میشود.
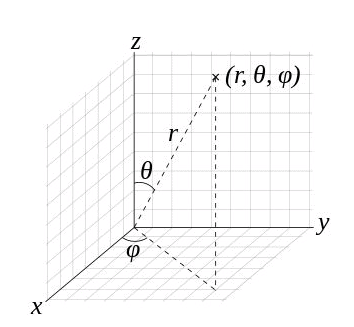
یا در سیستم موقعیت سه بعدی به صورت قطبی که شکل بالا بیانگر آن است،که با یک طول و دو تا زاویه نشان داده شده است.
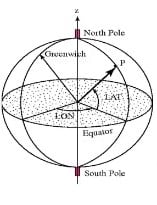
یا به صورت جئودزیکی، که تصویر بالا نشان دهنده آن است؛ طول و عرض جغرافیای و یک ارتفاع ازروی سطح مبنای مشخص.
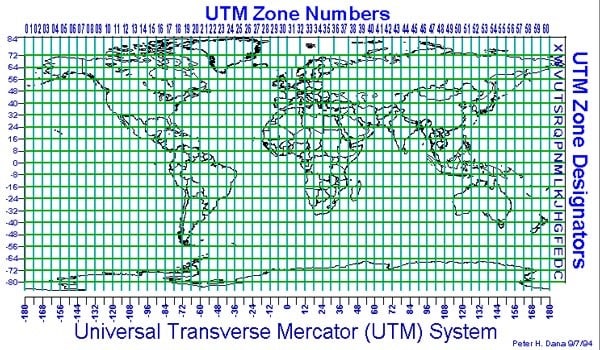
یا اگر بخواهیم به صورت UTM نشان بدهیم، تعیین موقعیت بصورت تصویر بالا خواهد بود.
به این صورت متوجه شدیم که تعیین موقعیت برای یک نقطه بدست آوردن پارامترهای آن در یک سیستم مختصات است.
در پروژه های عملی تعیین موقعیت روش های مختلف دارد.
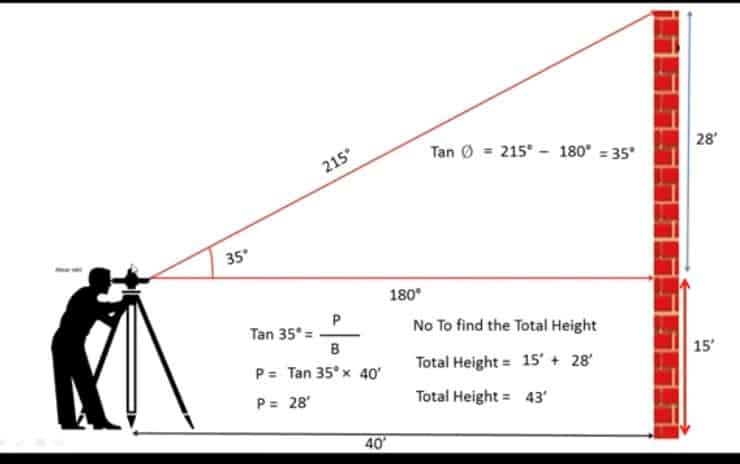
یکی از این روش ها تعیین موقعیت با دوربین توتال است، که با دوربین توتال به یک جهت مشخص توجه نموده ،مختصات نقطه را نسبت به یک نقطه دیگر دریافت می کنیم.
یا به واسطه تیودولیت زاویه و فاصله را میخوانیم و بعدا محاسبات را دستی انجام می دهیم و موقعیت آن نقطه را مشخص می کنیم، مانند تصویر زیر:
نحوه تعیین موقعیت با سامانه های ماهواره ای
تعیین موقعیت با این روش،یک عمل کرد مثل روش های قبلی دارد. اما با این تفاوت که ما دیتا خود را اینبار از ماهواره ها می گیریم.
زمانی که مدار ماهواره ها طراحی می شود و ماهواره پرتاب می شود دقیقا روی مدار خودش قرار می گیرد و در هر لحظه مکان هر ماهواره برروی مدارش مشخص است.
ماهواره ها مختصاتشان را برای کاربر زمینی ارسال می کنند. قدم بعدی اندازه گیری فاصله بین ماهواره ها و گیرنده زمینی است.
ماهواره ها مختصاتش را به صورت کد ارسال می کند که در آن اطلاعات زمان هم وجود دارد. گیرنده هم وقتیکه کد را دریافت می کند زمان را ثبت می کند و اختلاف این دو زمان ضرب در سرعت نور میشود فاصله بین ماهواره ها و گیرنده.
d=(T-t)C
که دراینجا :
d=فاصله بین ماهوراه و گیرنده.
T=زمان ارسال کد از ماهواره به سمت گیرنده.
t=زمان دریافت کد توسط گیرنده.
C=سرعت نور.
به این ترتیب فاصله را بدست آوردیم و مختصات ماهواره (X Y Z) هم مشخص است و فقط مختصات (X Y Z) نقطه زمینی مجهول است، که با نوشتن رابطه طول (d1=(X-x)2+(Y-y)2+(Z-z)2 ) آن را بدست می آوریم.
که در این رابطه:
d1=فاصله.
X=گیرنده.
x=ماهواره.
Y=گیرنده.
y=ماهواره
Z=گیرنده.
z=ماهواره
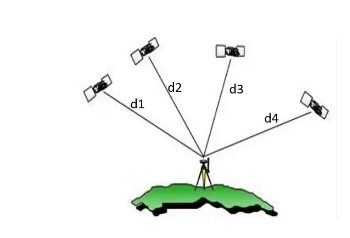
به این طریق می توانیم سه طول d1 d2 d3 را بخوانیم، و سه معادله بسازیم با سه مجهول که مختصات زمینی ما حل شود؛ و با حل این سه معادله میتوان مختصات زمینی را راحت بدست آورد.
این روش کاملا مبتنی بر اندازه گیری زمان است و از طرفی ساعتی که روی ماهواره هاست از نوع ساعت اتمی است ولی ساعت گیرنده از نوع کوارتس است که دقت ساعت اتمی را ندارد.
با توجه به اینکه از طریق سرعت نور فاصله را بدست می آوریم، یک ثانیه خطا باعث ایجاد 300 هزار متر خطا در یک طول می شود، به همین خاطر است که یک ماهواره چهارم هم در نظر میگیریم که دقت کار ما را بالا ببرد؛
با خواندن طول d4 خطای ساعت گیرنده را نیز به عنوان مجهول وارد معادله می کنیم، که در نتیجه می شود چهار معادله با چهار مجهول و از این طریق مختصات گیرنده زمینی را با دقت خوب بدست می آوریم.
ولی این روش که بر مبنای کد و زمان است در بهترین حالت 3 متر دقت دارد.
در نتیجه برای حل کردن این مشکل از خواندن موج حامل استفاده می کنیم، همان موجی که کد و زمان را با خودش از ماواره به گیرنده زمینی آورد.
با اندازه گیری تعداد موج کامل و موج های نصفه که نوسان را کامل نکرده این طول را بدست می آوریم. این همان کاری است که گیرنده های نقشه برداری انجام می دهند و ما را به دقت چند میلی متر می رسانند.
بپس از طریق اندازه گیری زمان به دقت سه متر می رسیم، همان کاری که گوشی های موبالمان انجام می دهد، و از طریق اندازه گیری موج حامل به دقت های چند میلی می رسیم که در کارهای نقشه برداری استفاده می شود.

سامانه های تعیین موقعیت GNSS

ما به صورت عادت از سامانه تعیین موقعیت تحت عنوان GPS یاد می کنیم ولی در واقع GPS تنها سامانه تعیین موقعیت نیست.
حالا چندین سامانه برای تعیین موقعیت وجود دارد و بهتر است که دیگر سامانه ها را بشناسیم و با آنها آشنا شویم؛
در مجموع به سامانه هایی که تعیین موقعیت را انجام می دهند Global Navigation Satellite System (GNSS) گفته می شود.
1.سامانه GPS
GPS اولین سامانه تعیین موقعیت است که در سال 1986 اندازی شده و شروع به کار کرد. این سامانه متعلق به کشور امریکا است.
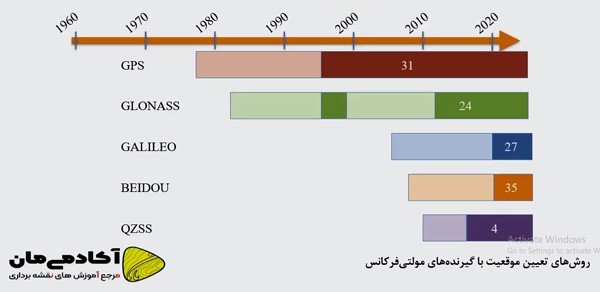
GPS به تعداد 32 ماهواره فعال و یک ماهواره ذخیره به روی مدار زمین دارد. در صورتی که برای هر کدام از ماهواره ها اتفاقی پیش بیاید این ماهواره ذخیره به صورت اتومات جایگزین میشود.
2-سامانه GLONASS
این سامانه چند سال بعد از GPS توسط شوروی سابق در رقابت با امریکا راه اندازی شد و بعد از مدتی از کار افتاد، ولی دوباره کشور روسیه بروز رسانیش کرد و حالا به خوبی کار میکند. این سامانه به تعداد 24 عدد ماهواره فعال در مدار زمین دارد.
3.سامانه GALIEO
سامانه GALIEO متعلق به اتحادیه اروپاست. هدف اولیه ایجاد این سامانه برای هوا شناسی بود اما الان می توانیم برای تعیین موقعیت از آن استفاده کنیم و دقت خوبی دارد. این سامانه به تعداد 27 ماهواره فعال در مدار زمین دارد.
4-سامانه COMPASS
سامانه COMPASS یا BeiDou بیدو متعلق به کشور چین است که تعداد ماهواره های این سیستم بشتر از تعداد ماهواره سامانه GPS است و به خوبی دارد کار می کند . این سامانه به تعداد 35 ماهواره فعال در مدار زمین دارد.
5-سامانه QZSS
QZSS متعلق به کشور ژاپن است و یک سامانه محلی است یعنی فقط در کشور ژاپن موقعیت را تعیین می کند. این سامانه 4 ماهواره فعال در مدار زمین دارد.
6-سامانه IRNSS
IRNSS هم یک سامانه محلی متعلق به کشور هند است.
پس چهار سامانه تعیین موقعیت جهانی داریم که گیرنده های چند فرکانسه ما از این چهار سامانه اطلاعات را دریافت می کنند.
درمجموعه نزدیک به 100 ماهواره در اطراف زمین داریم که بطور بیست چهار ساعت کار میکند.
با روشن کردن گیرنده ها مشاهده می کنید که 40 تا 50 عدد ماهواره را پیدا می کنند و این به خاطر زیاد تر شدن تعداد ماهواره هاست.
با زیادتر شدن ماهواره ها ساختار گیرنده ها هم تغییر کرده است. تعداد کانال گیرنده ها بیشتر شده و قدرت ردیابی بیشتری پیدا کردند.
فرکانس سامانه های ماهواره ای
هر سامانه در چند فرکانس مشخص اطلاعات را به سمت گیرنده های زمینی ارسال می کند.
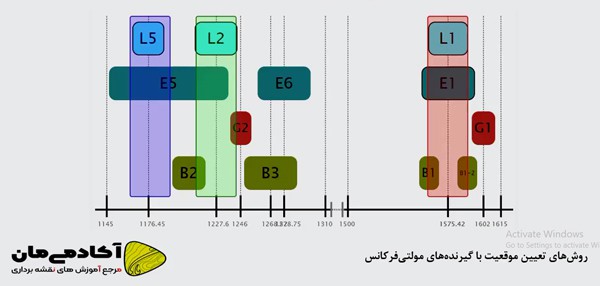
مثلا ماهواره GPS فرکانس های L1، L2، L5 را به سمت زمین ارسال می کند.
GPS ابتدا تنها یک فرکانس L1 را ارسال می کرد که دستگاه های آن وقت را تک فرکانسه می گفتیم. بعدا فرکانس L2 به GPS اضافه شد که همزمان با آن گیرنده های دو فرکانسه شاخته شد. مدتی بعد هم فرکانس L5 به GPS اضافه شد که همزمان با آن سامانه گلوناس هم شروع به کار کرد و به همین ترتیب به مرور زمان هر سامانه چند فرکانس را ارسال می کند.
حالا همانطور که در تصویر بالا می بینید، گیرنده های ما فرکانس های L ,E ,G ,B را از سامانه های مختلف دریافت می کنند و بخاطر همین این گیرنده ها را چند فرکانسه می گویند.
دلیل ارسال این طول موج های مختلف چیست؟
اصلی ترین عامل خطای تعیین موقعیت به روش ماهواره ای، لایه یونسفر است.
این لایه یونسفر یک لایه پخاش(دیفریکتیف) است و تاثیر آن بر روی طول موج ها و فرکانس های مختلف، متفاوت است.
درنتیجه در ماهواره ها از طول موج های متفاوت استفاده کردند تا بتوانند تاثیر این لایه را مدلسازی کرده و تا حد خیلی زیادی کاهش دهند؛ به همین دلیل است که گیرنده های چند فرکانسه دقت بیشتری نسبت به گیرنده های تک فرکانسه دارند.
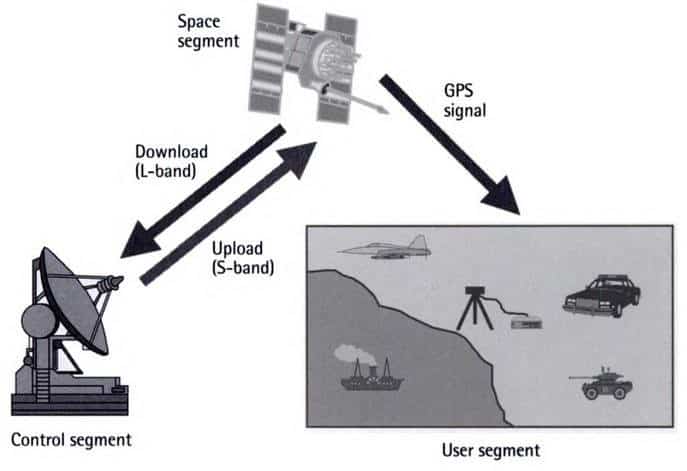
بخش هایی تشکیل دهنده سامانه های تعیین موقعیت ماهواره ای GNSS
بطور کلی هر سامانه تعیین موقعیت ماهواره سه بخش اصلی دارد.
- بخش فضایی که همان ماهواره است که اطلاعات را به کاربران زمینی ارسال می کند.
- بخش کنترل زمینی که تصحیحات را به ماهواره ها ارسال میکند و وضعیت ماهواره ها را رصد میکند.
- بخش کاربران زمینی که از گیرنده های GNSS استفاده میکند.
روش های تعیین موقعیت با سامانه های تعیین موقعیت ماهواره ای GNSS
بطور کلی چهار روش اصلی تعیین موقعییت ماهواره ای داریم:
- استاتیک
- RTK
- PPK
- O-RTK یا آنلاین RTK که شامل سامانه های شمیم هدا و سامانه های مشابه است.
در ادامه هر روش را بررسی میکنیم و کاربردهای آنرا خواهیم دید.
تعیین موقعیت استاتیک
اگر بخواهیم روش استاتیک را به شکل ساده بیان نماییم؛ در حقیقت همان پیمایش بستن سنتی است که برای مختصات کردن بتن های بنچمارک ها از آن استفاده میشود.
دقت روش استاتیک بسیار عالی است و تنها روشی است که امکان سرشکن کردن مشاهداتمان را می دهد.
روش کار تعیین موقعیت استاتیک
روش کار تعیین موقعیت استاتیک به این شکل است که باید روی ایستگاه ها به صورت همزمان سوار باشیم و به طور همزمان مشاهده انجام بدهیم و طول مدت زمان مشاهدات باید طبق استاندارد باشد.
در ایران استاندارد سازمان نقشه برداری، 10 دقیقه برای گیرنده های دو فرکانسه است. 10 دقیقه به عنوان پایه به اضافه یک دقیقه برای هر کیلومتر.
مثلا اگر بین دو بنچمارک شما 7 کلومتر فاصله باشد باید حداقل 17 دقیقه بین این دو بتن بنچمارک مشاهده مشترک داشته باشیم.
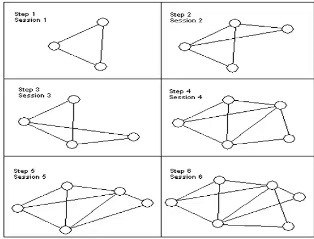
با این مشاهده مشترک که BASE LINE بیس لاین ها تشکیل می شود و با تشکیل BASE LINE ها باید مثلث ها را تشکیل بدهیم و با این اساس که هر نقطه ما باید حداقل در یک مثلث شرکت داشته باشه. زمانیکه یک نقطه در یک مثلث شرکت داشته باشد، میتوانیم آنرا سرشکنی بکنیم،می توانیم با نرم افزار مختلف این کار را انجام بدهیم.
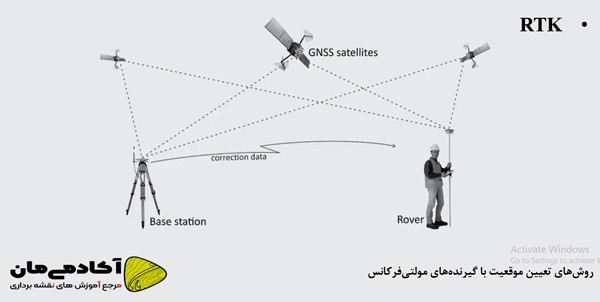
تعیین موقعیت RTK
در این روش حداقل به دو گیرنده نیازمند هستیم که یک گیرنده BASE است و روی ایستگاه معلوم یا رفرنس ما قرار میگیرد و مختصات تصحیح شده را به گیرنده ROVER که گیرنده متحرک است ارسال می کند.
روش کار تعیین موقعیت RTK
نحو کار تعیین موقعیت RTK به این شکل است که ما یک گیرنده را می بریم روی ایستگاه رفرنس که مختصات این ایستگاه از قبل معلوم است(یا از ایستگاه های کارفرما است یا خودمان به روش استاتیک مختصات دارش کردیم یا از ایستگاه های سازمان نقشه برداری است) مستقر می شویم.
بعد از مستقر شدن دستگاه خود را میزاریم و افزونه رادیویی گیرنده را فعال می کنیم. بعد به نرم افزار گیرنده مختصات دقیق همان نقطه را می دهیم.
این گیرنده از طریق مقایسه دو تا مختصات، یکی از مختصات همان مختصاتی که ما به نرم افزار دادیم و مختصات دوم مختصاتی است که خود گیرنده از طریق مشاهدات رادیویی به دست آورده، اختلافشان را محاسبه می کند. این اختلاف می شود همان شیفت. این شیفت را همراه با تصحیحات از طریق ارتباط رادیویی ارسال میکند به گیرنده ROVER. روی ROVER نیز یک گیرنده رادیویی قرار دارد که تصحیحات ایستگاه BASE را دریافت میکند و روی مختصاتی که خودش از ماهواره ها بدست آورده اعمال می کند و مختصات دقیق آن نقطه را بدست می آورد.
در این روش ارتباط بین BASE و ROVER از طریق رادیو وصل میشود و نباید فاصله بین BASE و ROVER بشتر از 5 کیلومتر باشد. اگر این فاصله از این بیشتر شود ، ROVER نمیتواند تصحیحات را دریافت کرده و مختصات دقیق را به ما اعلام کند.
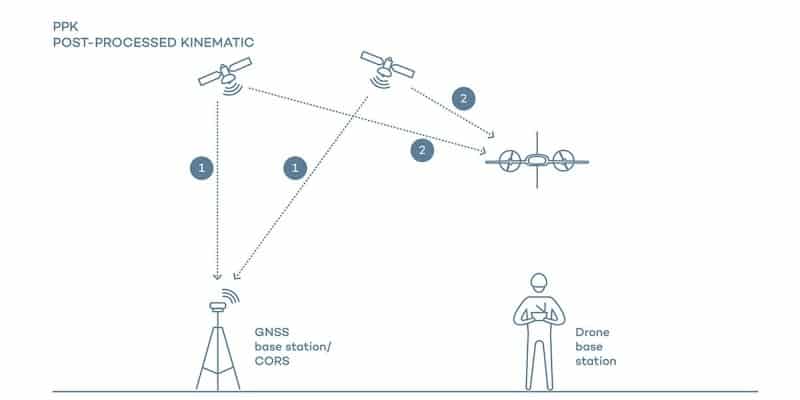
روش تعیین موقعیت PPK
روش PPK تقریبا مشابه روش RTK است، که یک دستگاه روی BASE قرار میگیرد و یک یا چند دستگاه به عنوان ROVER کار میکند.
فرق این روش با RTK در این است که بین BASE و ROVER در محل کار ارتباط رادیویی برقرار نمیشه و در نرم افزار بین دیتاهای BASE و ROVER ایجاد می شود و تصحیحات را خود ما در نرم افزار روی این دیتاها وارد می کنیم.
روش کار PPK به این شکل است که باز یک گیرنده را بر روی ایستگاه معلوم قرار می دهیم و اینبار برداشت را ذخیره می کنیم و مثل حالت RTK به دشتگاه ROVER ارسال نکند. با دستگاه ROVER هم مثل RTK برداشت را انجام می دهیم.
پس از اتمام کار تمام مختصات ها را وارد نرم افزار می کنیم. بعد به نرم افزار مختصات دقیق نقطه BASE که گیرنده ما برداشت کرده را می دهیم و نرم افزار خودش شیفت را حساب کرده و بر روی داده هایی که از گیرنده های ROVER بدست آمده اعمال می کند.
اصلی ترین مزیت روش PPK این است نیازی به ارتباط رادیویی بین BASE و ROVER نیست پس محدویت فاصله شان 5 کیلومتر نیست و می تواند تا حدود 25 الی 30 کیلومتر کارایی داشته باشد.
بزرگترین نقص PPK این است که برخلاف روش RTK مختصات دقیق برداشتی را در لحظه اندازه گیری نمیتوانیم بیبینم. فقط مختصات دقیق را میتوانیم در دفتر کار مشاهده کنیم.
روش O-RTK
این روش مشابه دو روش قبلی است با این تفاوت که در این روش، BASE از طرف ما تعیین نمی شود بلکه از طرف سازمانی دولتی یا خصوصی تعیین میشود و ما فقط ازش استفاده می کنیم.
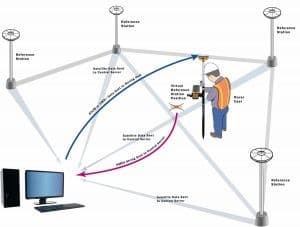
مثل سامانه شمیم که اکثرا با آن آشنا هستند که برای سازمان ثبت است. سازمان ثبت در حیات یا پشت بام ادارات خودش یک گیرنده قرار داده و اون بتنی که گیرنده بر رویش است را از قبل مختصات دار کرده و اون گیرنده تصحیحات را دریافت و محاسبه می کند و بجای اینکه با ارتباط رادیویی به دستگاه ROVER ارسال کند در یک سرور آپلود می کند.
گیرنده ما هم به اینترنت متصل می شود و با زدن نام کاربری و پسوورد در کنترلر گیرنده، به سرور سازمان ثبت متصل میشه و تصحیحات رو دانلود می کنه و اعمالش میکنه بر روی نتایجی که با مشاهدات ماهوراه ای بدست آورده.
باید به این نکته اشاره کنیم که ارتفاعی که از شمیم بدست می آید اصلا قابل استناد نیست و خطای ارتفاعی آن زیاد است.
مزایا روش O-RTK این است که دقت آن مثل RTK است و نیاز نیست که خودمان یک BASE بزنیم.
و عیب آن این است به اینترنت نیاز دارد.
البته اگر اینترنت هم نباشد می تونیم از روش PPK برداشت بکنیم و دیتامونو به سایت سامانه شمیم بدیم و مختصات دقیق رو از اونها بگیریم که این روش هم مشکلات خاص خودش رو داره. مثلا باید فاصلمون رو از ایستگاه بیس سازمان بدونیم و این فاصله نباید بیش از اندازه باشه و ….
معرفی نرم افزار پردازش دیتای GNSS
نرم افزارهای پردازش دیتای GNSS را می توانیم به دو بخش تقسیم بندی کنیم:
1-نرم افزار های علمی: مانند GAMIT،BERNES، GIPSY OASIS که نرم افزار های OpenSource هستند و اکثرا روی سیستم عامل لینوکس نصب می شوند بیشتر برای کارهای علمی، چاپ مقاله و کارهای تحقیقاتی از آن ها استفاده می شود.
2-نرم افزار تجاری : LGO و TBC که برای پروژه های نقشه برداری از این نرم افزارها استفاده می کنیم.
نرم افزار LGO مخفف Leica Geo Office نرم افزاری از شرکت لایکا است، این نرم افزار ساده و کم حجم است اما برای کار با شبکه های بزرگ مخصوصا شبکه هایی که خودتان آنها را برداشت نکرده اید و صرفا پردازش آنها را انجام می دهید کمی چالش دارد.
نرم افزار TBC هم که مخفف Trimble Business Center است، نرم افزار جامعی از شرکت Trimble است که تمام نرم افزار های این شرکت در آن قرار گرفته.
با این نرم افزار علاوه بر پردازش دیتا GNSS میتوانیم پردازش دیتای پهپاد انجام دهیم، کارهای Surface بکشیم و کار های اتوکد را انجام بدهیم.
در ایران نرم افزار LGO که همراه دستگاه های لایکا وارد کشور شده، بیشتر استفاده شده و نرم افزار TBC کمتر استفاده شده. شاید به این دلیل که فایل نصبی پرحجم تری دارد.
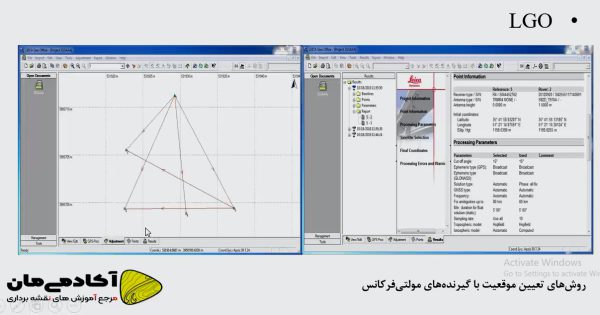

مقایسه دو نرم افزار LGO و TBC
اینجا به چند تفاوت این دو نرم افزار اشاره می کنیم:
- در نرم افزار LGO با وارد کردن دیتا باید تنظیماتی روی آن انجام بدید و پنجره به پنجره زمانبندی کرده تا بیس لاینهاتون تشکیل بشه اما در TBC به محض اینکه مجموعه فایل راینکس رو درگ می کنید و داخل نرم افزار می برید خودش پنجره های زمانی رو تشخیص میده و همه بیس لاینهارو تشکیل میده
- نرم افزار TBC گزارش گیری فوق العاده ای داره و هر اطلاعاتی که بخواهید میتونید ازش خروجی بگیرید
- در LGO ورژن 8.4 که سامانه های BeiDou و GALIEO اضافه شده توانایی پردازش همزمان هر چهار منظومه را ندراد اما TBC همه را به راحتی پردازش می کند.
پس نتیجه می گیریم که TBC نرم افزار قدرتمندتری در پردازش داده های GNSS است.
معرفی گیرنده های GNSS
گیرنده های GNSS را از نظر سطح قیمت می توانیم به 3 دسته زیر تقسیم کنیم:
1.گیرنده های امریکایی-اروپایی: مانند LEICA، TRIMBLE، HEMISPHERE
گیرنده های امریکای که قبلا به ایران وارد می شد، خیلی از ارگان های دولتی هنوز هم از این نوع گیرنده ها دارند، و در حال استفاده از این نوع گیرنده ها هستن. ولی کم کم این ارگان ها استفاده از این نوع گیرنده ها را محدود کرده و با گیرنده های ایرانی جاگزین کردند.
گیرنده LEICA ساخت کشور سویس است اما گیرنده های HEMISPHERE و TRIMBLE امریکایی است.
TRIMBLE، شرکت قدیمی تر است که دوربین های این شرکت در ایران آمده بود، ولی HEMISPHERE شرکت جدید است که در حال حاضر اکثر سهام آن را یک شرکت چینی خریده است.
2.گیرنده های چینی: مانند STONEX، HI-TARGET، SOUTH
گیرنده های چینی مانندی STONEX، HI-TARGET، SOUTH احتمالا بدانید که گیرنده STONEX ایتالیایی است اما حالا این گیرنده ها در کشور چین تولید می شود.
3.گیرنده های ایرانی: مانند RAYMAND، HIRO، ARE-TECH

این گیرنده ها از نظر قیمت تفاوت فاحش باهم دارند، مثلا گیرنده TRIMBLE-AR-10 نزدیک 300 میلیون تومان است که با این مبلغ می شود 6 گیرنده چینی یا ایرانی تهیه کنیم. از طرفی علی رقم کیفیت بالای گیرنده های آمریکایی به دلیل تحریم ها خدمات پس از فروشی برای آنها وجود ندارد.
اگر قصد آشنایی بیشتر یا خرید گیرنده های مولتی فرکانس را دارید پیشنهاد می کنم به مقاله راهنمای خرید گیرنده های مولتی فرکانس سر بزنید.
پاسخ به سوالات متداول:
- سامانه تعیین موقعیت GNSS چیست؟ آیا همان GPS است؟
GPS یکی از سامانه های تعیین موقعیت ماهواره ای است و در مجموع به سامانه هایی که تعیین موقعیت را انجام می دهند Global Navigation Satellite System (GNSS) گفته می شود.
سامانه های تعیین موقعیت مجموعه ای از ماهوراه ها هستند که به سمت گیرنده ها سیگنال ارسال می کنند تا عملیات تعیین موقعیت انجام شود.
- GNSS شامل چند ماهواره می شود؟
GNSS به مجموع سامانه های تعیین موقعیت گفته می شود. هر کدام از این سامانه ها بیش از یک ماهواره دارند.
GPS، GLONASS، GALIEO، COMPASS، QZSS و IRNSS سامانه های تعیین موقعیت هستند.
- در خصوص ضریب مقایس در روش RTK توضیح دهید:
برداشت گیرنده های GNSS مستقیم روی بیضوی مختصات می دهد و دارای ضریب مقایس نیست. اگر با روش استاتیک برداشت کنیم میتوانیم روی ایستگاه های خود در وقت پردازش ضرایب مقایس بگیریم. در RTK هم میتونید محاسبش بکنیم ولی برای برداشت و پیاده سازی با استفاده از خود گیرنده های GNSS نیازی به ضریب مقیاس نداریم.
- آیا تصحیح کرویت زمین برای تعیین مساحت باید اعمال شود برای طول کمتر از 100 متر مربع؟
نه، گیرنده های GNSS مستقیم از روی بیضوی برداشت می کند و مساحتی که حساب می کنیم همان مساحت بدست آمده از مختصات UTM است که توسط گیرنده های مولتی فرکانس ثبت شده بدست آورده ایم.
- جایی که ارتفاع مهم است بهتر است با دوربین برداشت شود یا RTK ؟
با روش RTK هم به دقت یک و نیم سانت میرسیم، استفاده از وسایل بستگی به دقت پروژه خواسته شده از ما دارد، نظر به دقت پروژه باید در نظر بگیریم که کدام روش را در انتخاب می کنیم، که اگر کار صنعتی است و دقت خوبی نیاز دارد باید با دوربین برداشت را انجام بدهیم.
- برای پیاده سازی نقاط با گیرنده های GNSS خطا زیاد است ؟
نخیر هیچ فرقی در برداشت و پیاده سازییشان وجود ندارد. همان دقت زیر یک سانت مسطحاتی و زیر یک و نیم سانت ارتفاعی به روش RTK را می توانیم به راحتی با گیرنده های GNSS برسیم .از طرفی سرعت عمل نسبت به دوربین در این روش بیشتر است.
- برای یک شبکه استاتیک می توانیم از چند نوع گیرنده مختلف استفاده کنیم؟
بله میتوانم از چند نوع گیرنده مختلف استفاده کنیم. سازمان نقشه برداری پیشنهاد داده که گیرنده ها از یک نوع باشد بهتر است. ولی گیرنده ها هم از یک نوع نباشد هم کدام مشکل جدی رخ نمی دهد.
- روش RTK برای کارهای ارتفاعی به چه اندازه دقت دارد؟
این روش برای کارهای ارتفاعی به اندازه 1.5 سانت دقت دارد، در صورت که فاصله BASE و ROVER مناسب باشد و منطقه داری پوشش نباشد.
- تفاوت بین رادیوهای اینترنال و اکسترنال در گیرنده ها چیست؟
رادیو های اینترنال فابریک روی گیرنده ها قرار دارد و رادیوهای اکسترنال به صورت خارجی به دستگاه اضافه میشود. رادیوهای اکسترنال معمولا برای ایستگاه های پایه استفاده می شود. تفاوت این دو در این است که رادیو های اینترنال از همان باطری گیرنده نیروی برقشان را تامین می کنند و رادیو های اکسترنال از یک عامل بیرونی. هم چنان ها برد رادیوهای اکسترنال از اینترنال بیشتر است.
- آیا روش استاتیک نسبت به روش های RTK و ONLINE RTK دقت بیشتر دارد؟
بله روش استاتیک نسبت به همه روش ها دقت بهتری دارد زیرا این روش پایه و اساس است.
- گیرنده های مولتی فرکانس بیشتر از کدام ماهواره به جز از ماهواره های GPS استفاده می کند؟
فرقی بین ماهواره وجود ندارد و گیرنده همه سامانه ها را بصورت یکسان دریافت می کند. هر سامانه که تعداد بیشتر ماهواره داشته و در میسر افق دید بیشتر قرارگیرد، تاثیر بیشتری خواهد داشت.
- در روش RTK یا همان بیس و رووِر، اگر دو دستگاه در فاصله مناسبی از هم باشند نهایتا به چه دقتی از نظر ارتفاعی می توانیم برسیم؟
دقتی که روی خود دستگاه نشان داده می شود بعضا روی یک سانتی متر هم می رود اما نکته ای که وجود دارد این است که این دقت از روی بیضوی است و ما میدونیم که کارفرما ارتفاع از ژئوئید را می خواهد یعنی همان ارتفاع ارتومتریک. پس ما باید ارتفاع را از بیضوی به ژئوئید تبدیل کنیم. زمانی که تبدیل را انجام میدیم بسته به اینکه ایستگاه رفرنس چقدر فاصله داشته نتیجه متفاوتی بدست می آید چون میدانید که فاصله بیضوی ژئوئید عدد ثابتی نیست و از یک نقطه به نقطه دیگر متفاوت است. با این توضیحات اگر شما سعی کنید فاصله بین دو ایستگاه حداکثر بیش از 1 کیلومتر نشود میتوانید به دقت یک سانتی متر برسید.










13 دیدگاه
به گفتگوی ما بپیوندید و دیدگاه خود را با ما در میان بگذارید.
باسلام و خسته نباشید
تشکر میکنم از مطالب عالی و ارزنده شما
یک سوال داشتم از خدمتتان
در مناطق صعب العبور کوهستانی که میخواهیم با پهپاد و روش PPK نقشه برداری انجام بدهیم ، یک دستگاه را که میخواهیم به عنوان Base مستقرکنیم ، باید مختصات دقیق آن نقطه را از چه روشی به دست آوریم ؟
آیا روش کار اینگونه است که بدون در دست داشتن مختصات دقیق Base در ابتدای کار ، دستگاه را در Base مستقر می کنیم تا شروع به برداشت استاتیک کند و همزمان پهپادمان شروع به عکس برداری کند؟
ممنون میشم راهنمایی کنید مرسی
با سلام خدمت تیم خوب موسسه مان
اجازه می دید از متن شما برای تحقیق دانشگاه است استفاده کنیم . کسب اجازه
سپاس از همراهیتان – مشکلی نیست
سلام و عرض ادب
انصافا توضیحات جامعی ارایه فرمودید. مجاورت و همسایگی با استاد گودرز سعادت بزرگی میخاد که نصیب هر کسی نمیشه. بنده با سه نسل از نقشهبرداران زحمت کش کارکردم. در سالهای ۱۳۷۲،آن زمان که توتال هم نبود،برای انتقال مختصات،شبانه روی نقاط ماندگار مستقر، و با بستن به ستاره قطبی،انتقال مختصات میدادیم. اون موقع ۲۰ سال سن داشتم. با آمدن دیستوماتها اوضاع کمی بهتر شد و پس از ظهور توتال استیشن ها،کارها آنقدر آسان شد که هر کس اراده میکرد ،در عرض یک هفته اپراتور نقشهبرداری میشد. حالا با ظهور نو پدیده جی پی اس، نور علا نور شده و آسان و دقیق.
خدا رو شکر میکنم که پس از ۳۰ سال،هنوز عاشق این رشته هستم و فقط به کسانی که به این رشته اشراف دارند کلمه مهندس اطلاق میکنم.
بنده کارشناس عمران نقشهبرداری هستم از خطه جنوب خوزستان.
سه سال است که GPS رایمند تهیه کردم. در مقایسه دستگاه esurvey ۱۰۰ که داشتم توقع زیادی از رایمند ندارم و اشتباه بزرگی کردم.
از اساتید بزرگ سوال دارم ، با توجه به این صحبتها و فرمایشات جامع و قشنگ ، آیا دوره تکمیلی جی پی اس و پهپاد هم دارید که به جمعتان شرف یاب بشویم.؟
در از جون همه، نمیخواهم نادان دفنم کنند!!
سلام آقای مهندس، من برای تحقیق دانشگاهم نیاز به راهنمایی داشتم. آیا مختصات شمیم برای کارهای عکاسی و در کل پهپاد فتوگرامتری مناسب هست؟
دقت ارتفاعی و مختصاتی شمیم، دقت و صحت لازم برای انجام پروژه ها را دارند
ممنون میشم راهنمایی بفرمایید
سلام وقت بخیر
دقت مستحاتی شمیم مناسبه اما دقت ارتفاعی اون برای کارهای دقیق، دقت مناسب را ندارد. بهترین حالت برای کارهای دقیق استفاده از روش بیس و رور است.
با سلام
یکی از معایب روش PPK که باعث می شه من هیچ وقت از این روش استفاده نکنم این هست که ممکنه به هر دلیلی که معمولا عبور از منطقه های که امکان قطعی ارتباط روور با ماهواره هست باشه از اون لحطه به بعد قرائت ها دیگه قابل پردازش نیست , مثلا قرار شما سی تا نقطه برداشت کنی زمان حرکت بین نقطه بیست تا بیست و یک ارتباط دستگاه به هر دلیلی قطع می شه یا از زیر درخت رد می شی یا دستگاه از دست می افته يا پی داپ به خاطر کوهستانی بودن منطقه خوب نیست از اون لحظه به بعد قرائت های شما دیگه قابل پردازش نیست و باید دوباره تکرار بشه حالا این رو کی متوجه می شه وقتی که منطقه رو ترک کردی و پای سیستم نشستی, این خیلی بده
سلام. مهندس جان این کار قلق داره و اصلا به این شکلی فرمودید نیست. من تجربه ۶۰ کیلومتر برداشت با این روش رو داشتم وقتی که اصلا شمیم وجود نداشت، و وسط کار ناهار هم میخوردیم و دوباره استارت میزدیم. چندتا قلق داره برای اینکه اين مشکلی که میفرمایید حل بشه، فقط تو دستگاه رایمند من هنوز نتونستم راه حلی براش پیدا کنم.
میشه قلقش رو توضیح بدین.
سلام
ضمن تشکر از مطلب خوبتون یک سوال داشتم:
چرا ما(شبکه نقاط بنچ مارکی) رو ایجاد می کنیم؟ که بعد بخوایم این نقاط شبکه رو تعیین موقعیت دقیق کنیم؟ هدف از ایجاد این شبکه نقاط چی هست؟
درود بر شما
بنچ مارک ها نقاط ثابتی هستند که بعد از برداشت، برای پیاده سازی مثلا یک مسیر یا یک ساختمان باید از اونها استفاده کرد.
سلام وقت بخیر
قرائت استاتیک همزمان با چند دستگاه ایده آل میشه؟
سلام وقت بخیر
برای قرائت استاتیک حداقل به دو دستگاه نیاز دارید، اما حالت ایده آل، داشتن حداقل ۳ دستگاه است. با ۳ دستگاه سرعت قرائتتون به روش مثلث بندی خیلی زیادتر میشه